1. Stepper motor
A stepper motor is a pulse-driven motor that changes the angular position of the rotor in steps. Due to this nature of a stepper motor, it is widely used in low cost, open loop position control systems.
Types of stepper motors:
- Permanent Magnet
- Employ permanent magnet
- Low speed, relatively high torque
- Variable Reluctance
- Does not have permanent magnet
- Low torque
1.1 Variable Reluctance Motor
Figure 4.2.1 shows the construction of Variable Reluctance motor. The cylindrical rotor is made of soft steel and has four poles as shown in Fig.4.2.1. It has four rotor teeth, 90⁰ apart and six stator poles, 60⁰ apart. Electromagnetic field is produced by activating the stator coils in sequence. It attracts the metal rotor. When the windings are energized in a reoccurring sequence of 2, 3, 1, and so on, the motor will rotate in a 30⁰ step angle. In the non-energized condition, there is no magnetic flux in the air gap, as the stator is an electromagnet and the rotor is a piece of soft iron; hence, there is no detent torque. This type of stepper motor is called a variable reluctance stepper.
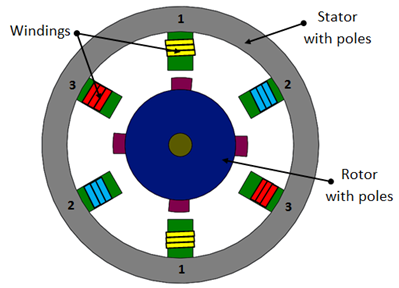
Fig. 4.2.1 Variable reluctance stepper motor
1.2 Permanent magnet (PM) stepper motor
In this type of motor, the rotor is a permanent magnet. Unlike the other stepping motors, the PM motor rotor has no teeth and is designed to be magnetized at a right angle to its axis. Figure 4.2.2 shows a simple, 90⁰ PM motor with four phases (A-D). Applying current to each phase in sequence will cause the rotor to rotate by adjusting to the changing magnetic fields. Although it operates at fairly low speed, the PM motor has a relatively high torque characteristic. These are low cost motors with typical step angle ranging between 7.5⁰ to 15⁰ .
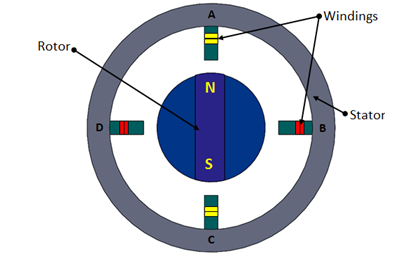
Fig. 4.2.2 Permanent magnet stepper
1.3 Hybrid stepper motor
Hybrid stepping motors combine a permanent magnet and a rotor with metal teeth to provide features of the variable reluctance and permanent magnet motors together. The number of rotor pole pairs is equal to the number of teeth on one of the rotor's parts. The hybrid motor stator has teeth creating more poles than the main poles windings (Fig. 4.2.3).
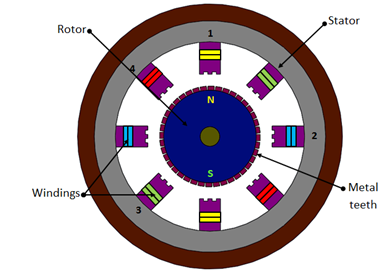
Fig. 4.2.3 Hybrid stepper
Rotation of a hybrid stepping motor is produced in the similar fashion as a permanent magnet stepping motor, by energizing individual windings in a positive or negative direction. When a winding is energized, north and south poles are created, depending on the polarity of the current flowing. These generated poles attract the permanent poles of the rotor and also the finer metal teeth present on rotor. The rotor moves one step to align the offset magnetized rotor teeth to the corresponding energized windings. Hybrid motors are more expensive than motors with permanent magnets, but they use smaller steps, have greater torque and maximum speed.
Step angle of a stepper motor is given by,
 |
(4.2.1) |
Advantages of stepper motors :
- Low cost
- Ruggedness
- Simplicity of construction
- Low maintenance
- Less likely to stall or slip
- Will work in any environment
- Excellent start-stop and reversing responses
Disadvantages of stepper motors :
- Low torque capacity compared to DC motors
- Limited speed
- During overloading, the synchronization will be broken. Vibration and noise occur when running at high speed.