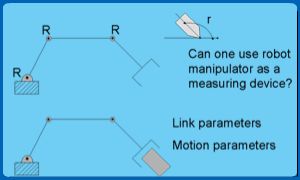
Manipulators may be used as measuring tools as shown in figure 5.3.1. With link lengths and joint angles known we can determine position & orientation of end effector. This technique is used for teaching.