8.7.3. Crank shaft motion:
Here, two successive monomers, forming U shape moves to the new position.
Figure 8.8: Schematic representation of crank shaft motion
8.7.4. Pivot Algorithm:
A larger portion of chain (selected randomly) flips a new position. It is applicable for dilute system. In the dense system, majority of the moves are rejected and hence not used in such cases.
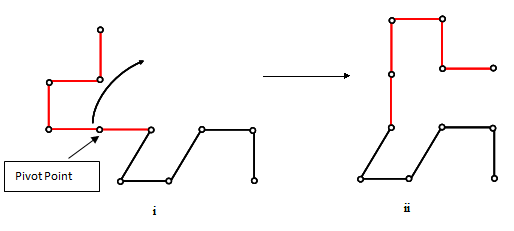
Figure 8.9: Schematic representation of pivot algorithm
8.7.5. Reptation (or slithering diffusion)
Unlike the previous moves, which are mostly local, this move is a global move, the entire chain moves in either direction, initiated by one of the ends, by a certain distance. This move is usually implemented as follows.
- Select a terminal monomer with equal probability
- Select a vacant site within the allowable distance of the other terminal monomer.
- Move the monomer to that position (subject to the satisfaction of energy criteria).
- If the move is rejected, interchange the ‘head’ and ‘tail’ monomer and count as if the a move has been made (Wall and Mandel, JCP, 1975)
Figure 8.10: Schematic representation of reptation
The above method is not suitable to simulate copolymer, where, co monomers have a specific sequence along the chain. Removing one monomer from one end and adding to other end would change the sequence. In copolymer, each unit should move one position along the trajectory so that the sequence is maintained.
Figure 8.11: Schematic representation of reputation (for copolymer)
Filled circles are co-monomers, sequence is maintained during the move