14.1 The Hypersonic Small Disturbance Theory
Some special applications in the hypersonic speed regime need aircraft configurations of low drag and high lift or high lift to drag (L/D) ratio. Therefore, in such hypersonic applications, slender body configurations are generally preferred. Governing equations can be specially derived for this constraint. The formulation in this case is referred to as Hypersonic Small Disturbance Equations.
Consider a typical slender body as shown in Fig. 14.1
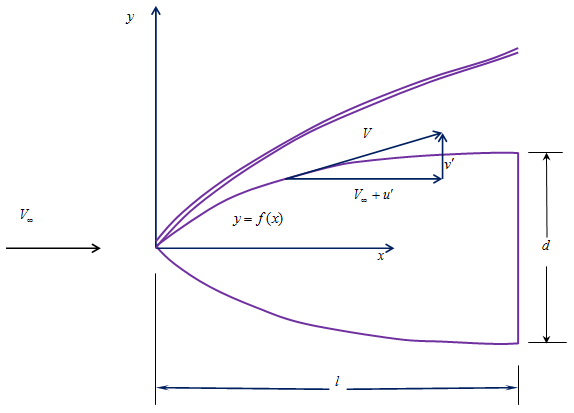
Fig 14.1: Typical slender body considered for high L/D.
Here the freestream velocity V∞ gets changed behind the shock and then on the body. Let us assume that the change in this velocity is more while cross the shock in comparison with the change taking place during the travel of the fluid over the body. Let u' and v' be the change in x and y components of velocity vector. Thus the velocity at any point on the surface of the body can be given by,
![]()
Here, freestream velocity V∞ is assumed to be aligned with X-axis. The changes in the velocity, i.e. u’ and v’ are called perturbation velocities. These changes might not be always small. However for hypersonic Flow over slender body we are assuming these changes are small in comparison with the freestream velocity.
But u’ and v’ may not be < a∞. Let the surface of the slender body follow a profile mathematically represented as y = f(x). Since the velocity ![]() , at any point on the body surface, is tangential to the surface at that point, slope of the velocity and slope of the tangent to the surface are same. Hence this tangency condition can be written as,
, at any point on the body surface, is tangential to the surface at that point, slope of the velocity and slope of the tangent to the surface are same. Hence this tangency condition can be written as,
 |
14.1 |