3.4.1 Best Linear Unbiased Estimator (BLUE)
In many estimation problems, the MVUE or a sufficient statistics cannot be found or indeed the PDF of the data is itself unknown (only the second-order statistics are known in the sense that they can be estimated from data). In such cases, one solution is to assume a functional model of the estimator, as being linear in the data, and find the linear estimator which is unbiased and has minimum variance. This estimator is referred to as the best linear unbiased estimator (BLUE).
Consider the general vector parameter case θ, the estimator is required to be a linear function of the data, i.e.,

The first requirement is that the estimator should be unbiased, i.e.,

which can be only satisfied if:

The BLUE is derived by finding the A which minimizes the variance,  subject to the constraint AH = I, where C is the covariance matrix of the data x. Carrying out the minimization yields the following form for the BLUE:
subject to the constraint AH = I, where C is the covariance matrix of the data x. Carrying out the minimization yields the following form for the BLUE:

where  .
.
Salient attributes of BLUE:
- For the general linear model, the BLUE is identical in form to the MVUE.
- The BLUE only assumes only up to 2nd-order statistics and not the complete PDF of the data unlike the MVUE which was derived assuming Gaussian PDF.
- If the data is truly Gaussian then the BLUE is also the MVUE.
The BLUE for the general linear model can be stated in terms of following theorem.
Gauss-Markov Theorem: Consider a general data model of the form:
x = Hθ + w
where H is known, and w is noise with covariance C (the PDF of w otherwise arbitrary).
Then the BLUE of θ is:

where  is the minimum covariance matrix.
is the minimum covariance matrix.
3.4.2 Example
Consider a signal embedded in noise:

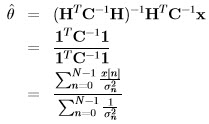
where w[n] is of unspecified PDF with var(w[n]) = σn2 and the unknown parameter θ = A is to be estimated. We assume a BLUE estimate and derive H by noting:
E[x] = 1θ
where x = [x[0],x[1],x[2],…,x[N - 1]]T , 1 = [1, 1, 1,…, 1]T and we have H ≡ 1. Also:
and hence the BLUE is:
and the minimum covariance is:
and we note that in the case of white noise where σn2 = σ2 then we get the sample-mean estimator:
and the minimum variance  .
.
3.4.3 Example
Consider the acoustic echo cancellation (AEC) problem and the signal flow-graph of the same is shown in Figure 3.1. A speech signal u[n] from the far-end side is broadcast in a room by means of a loudspeaker. A microphone is present in room to record the local signal v[n] which is to be transmitted back to the far-end side. The recorded microphone signal y[n] = v[n] + x[n] contains the undesired echo x[n] due to acoustic echo path existing between loudspeaker and microphone. The echo path transfer function is modeled using an FIR filter  , so the echo signal can be considered as a filtered version of the loudspeaker signal
, so the echo signal can be considered as a filtered version of the loudspeaker signal  . The object of the AEC is to estimate the impulse response Ĥ(z) of the echo path so as to produce a echo-free signal
. The object of the AEC is to estimate the impulse response Ĥ(z) of the echo path so as to produce a echo-free signal  .
.
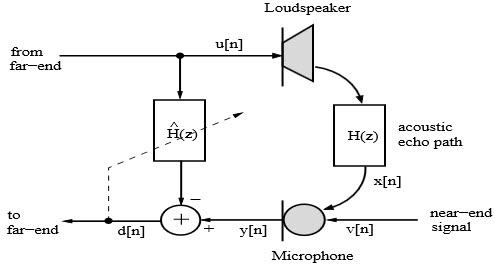
Figure 3.1: Acoustic echo cancellation problem
The linear estimation problem for the derivation of echo path impulse response can be written as

where it is assuned that u[n] = 0 for n < 0. In matrix form we have
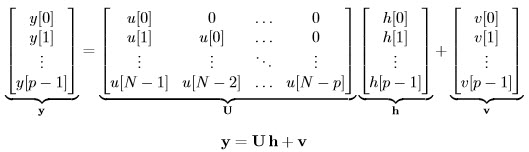
here v the near-end signal vector is modeled as zero mean process with correlation matrix
R = EvvT. Any linear estimator of h can be written as a linear function of the microphone signal vector y as

Minimizing the variance
under the unbiasedness constraint ATU = I results in the BLUE:

with  as the minimum covariance.
as the minimum covariance.
3.4.4 Example
Show that the BLUE commutes over linear (affine) transformation.
Let us consider that given BLUE  of θ we wish to estimate
of θ we wish to estimate

where B is a known p × p matrix and b is known p × 1 vector.
Then the BLUE of  is given by
is given by

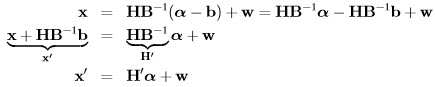
Consider the linear model of the data:

where H is known, and w is noise with covariance C (the PDF of w otherwise arbitrary).
Then the BLUE of θ is:

where  is the minimum covariance matrix. Further assuming that transformation matrix B is invertible, we get
is the minimum covariance matrix. Further assuming that transformation matrix B is invertible, we get
Then,
Therefore,
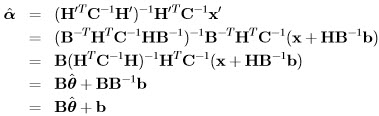
This shows that in case of linear transformation of the parameter the BLUE of the transformed parameter could be obtained by simply by applying the same linear transform to the BLUE of the original parameter.