Developing actuator and sensor influence matrix.
The strain vector can be written in another form as
 |
(20.13) |
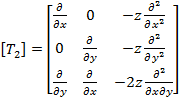
where
 and and  |
(20.14) |
 |
(20.15) |
Aq is the shape function matrix
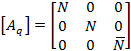 |
(20.16) |
 , ,  |
(20.17) |
Finally, multiplying T2 and Aq
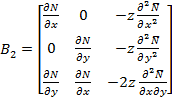 |
(20.18) |
Substituting the expression of strain from Equation (20.8) into Equation (20.5), we get
 |
(20.19) |
Since at the element level, the force by the actuator  is is  from Equation (20.11), it may be written as from Equation (20.11), it may be written as
 |
(20.20) |
 |
(20.21) |
or
 |
(20.22) |
Matrix  is the integration part of is the integration part of  . . |