Let us exemplify the procedure to find out the response of a continuous system under distributed control.
Example: Consider a freely vibrating simply supported beam of length L, subjected to velocity feedback based distributed control. There are two specified initial conditions of velocity 0 and 1. Find out the responses of the system and compare it with the uncontrolled vibration for a control gain of unity.
Solution Let us consider w, the transverse deflection of the simply supported beam which can be expressed as the product of the following spatial and temporal functions -
 |
(29.1) |
After variable separation, the governing eqn. (28.7) reduces to
 |
(29.2) |
Where
|
|
(29.3) |
 |
Consider  where, where,  , Here λ is a complex eigen-value. The damped natural frequency , Here λ is a complex eigen-value. The damped natural frequency  and the damping constant α of the system may be evaluated as: and the damping constant α of the system may be evaluated as:
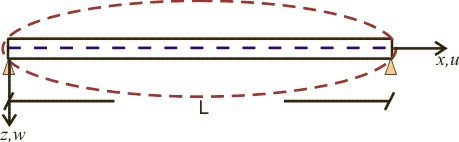
Figure 29.1: A simply supported beam vibrating in 1st mode | 
 ,
, 
 and
and 