| |
Correlation-based PIV has the advantage over particle tracking algorithms in which each
particle path is followed. In contrast, in correlation based PIV, the average motion of
small group of particles contained in the interrogation spot is calculated by spatial auto
correlation or cross correlation. Auto correlation is performed when images for both
laser pulses are recorded on the same sensor, while in cross correlation, each pulse is collected
into separate frames. Cross correlation calculation becomes faster in the frequency
domain since the FFT algorithm is now applicable. There is directional ambiguity in
auto correlation technique. Hence, in case of reversed
flow, this technique is not suitable.
The drawback can be eliminated using the cross correlation technique. Cross correlation
allows us to use a small interrogation area compared to auto correlation and leads to a
reduction of the random error due to spatial velocity gradients. An important condition
involves depth of field of recording optics and laser light sheet thickness. Generally,
depth of the field should not be smaller than the thickness of the light sheet in order to
avoid imaging out-of-focus particle.
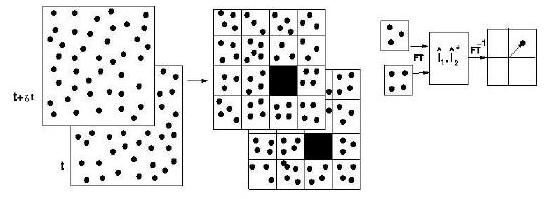
Figure 3.30: Cros Corellation analysis of a piv Image Pair
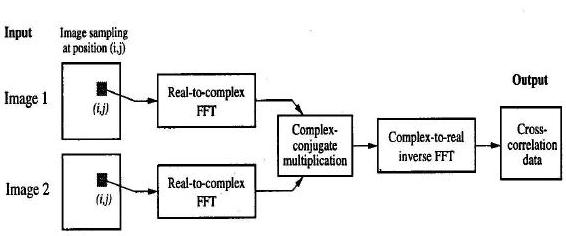
Figure 3.31: Computation of cross correlation using FFT.
|