Eq. (5.1) has to be written at all grid points, resulting in a system of algebraic equations from which the unknowns  for all for all  can be solved simultaneously. This is a typical example of an implicit finite-difference solution (Fig. 5.1). can be solved simultaneously. This is a typical example of an implicit finite-difference solution (Fig. 5.1).
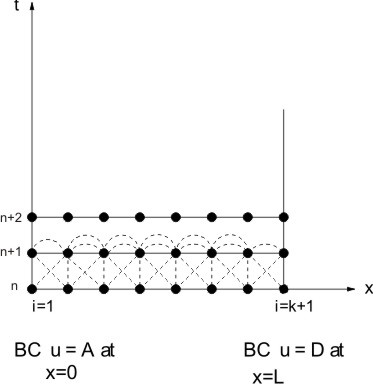
Figure 5.1: Crank Nicolson Implicit Scheme
Since they deal with the solution of large system of simultaneous linear algebraic equations, implicit methods usually require the handling of large matrices.
Generally, the following steps are followed in order to obtain a solution. Eq (5.1) can be rewritten as
 |
(5.2) |
where  or or
or
 |
(5.3) |
Eq. (5.3) has to be applied at all grid points, i.e., from  to to  A system of algebraic equations will result (refer to Fig 5.1). A system of algebraic equations will result (refer to Fig 5.1).
Finally the equation will be of the form:
Here, we express the system of equation in the form of A , ,
where,
C: right-hand side column vector (known),
A: tridiagonal coefficient matrix (known) and
 : the solution vector (to be determined). : the solution vector (to be determined).
Note that the boundary values at and  are transferred to the known right-hand side. are transferred to the known right-hand side.
For such a tridiagonal system, different solution procedures are available. In order to derive advantage of the zeros in the coefficient-matrix, the well known Thomas algorithm (1949) can be used .
|